 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
设受控对象的开环模型为试采用四阶参考模型法设计校正装置Ge(s),使得校正后实现下述性能指标
设受控对象的开环模型为试采用四阶参考模型法设计校正装置Ge(s),使得校正后实现下述性能指标
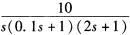
设受控对象的开环模型为

试采用四阶参考模型法设计校正装置Ge(s),使得校正后实现下述性能指标
(a)静志速度误差系数Ky≥80:
(b)开环截止频率we>2:
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
设受控对象的开环模型为
试采用四阶参考模型法设计校正装置Ge(s),使得校正后实现下述性能指标
(a)静志速度误差系数Ky≥80:
(b)开环截止频率we>2:
如果结果不匹配,请 联系老师 获取答案
 更多“设受控对象的开环模型为试采用四阶参考模型法设计校正装置Ge(…”相关的问题
更多“设受控对象的开环模型为试采用四阶参考模型法设计校正装置Ge(…”相关的问题
A.
B.
C.
D.
在参考输入为r(t)=2t时系统的稳态误差为()。
A.10
B.0.1
C.0.2
D.2
其动态性能指标满足ts=6s,σ%=16%。试确定系统的时间常数T及开环放大倍数K的值。



















